上周日突如其来的一场瓢泼大盆,不对…瓢盆大雨!呃…倾瓢那啥…大雨…嗯…反正就是下了场大雨,让我原定的威马W6试驾“泡汤”了,不过也无妨,因为这次试驾本就不是为了测续航来的,而是为了思考一些事情。

思考什么呢?这次试驾的威马W6,车长4620mm,价格16.98-25.98万元,两个条件都满足上海地区上绿牌的要求,双重肯定表…呃…表特别肯定;续航里程分为520km和620km两个版本,中规中矩的续航水平;单电机前驱,所以不必担心会打滑甩尾,因为它的最大输出也就是160kW、225Nm,常规2.0T的水平,看起来就是非常规矩的一款电动车。

但是威马W6发布了一些相当有意思的新功能,其中值得拿出来说说的,我认为有两个不可或缺,AVP无人自主泊车和SOA场景编程,无人自主泊车又分为自主学习泊车和高精地图泊车,前者适用于固定车位和固定路线的场景,后者则适用于大型商场、写字楼等非固定车位的场景。

具体来看,自主学习泊车主要适用于家或公司且车位固定、路线固定的泊车场景,开启系统后带领车辆学习一次泊车路线,系统就会在本地和云端自动保留行驶轨迹和预设车位的位置,其硬件使用了6个高清摄像头(2前视+4环视)、5个毫米波雷达和12个超声波雷达,用来感知路线、规避障碍。

从功能上看,自主学习泊车更像是市面上常见的自动泊车入位的升级版,将车辆自主行为延伸到车位之外更远的距离,但功能范围依然有限,而高精地图泊车则是在特定的大型商场中自主寻找车位、规划路线、规避障碍、跨层巡航和泊车入位,所以这项功能需要依赖于高精地图数据和极其强大的算力支持。

能够发现,自动泊车技术的发展是为了解放用户,最早的自动泊车需要驾驶员坐在车内操作,但对于停车技术不熟练的用户来说确实有所帮助;后来出现了驾驶员可以在车外的无人自动泊车和遥控泊车,范围仅限找到车位之后的泊车入位,对于狭窄车位来说确实更为方便;威马的自主学习泊车是将这个便利性的范围扩大,但从概念上来说,算是解放用户的第一步。

而最后的高精地图泊车才算是真正的无人自主泊车,也是真正意义上的解放用户,但这种级别的功能对于高精地图数据和算力的要求和依赖极强,短时间内很难真正实现应用,威马表示这项功能会在今年内通过OTA升级向车主推送。目前来看距离它的实用意义得到体现,还为时尚早,但这一步推送的引导意义却会在未来几年内逐步发挥显现。

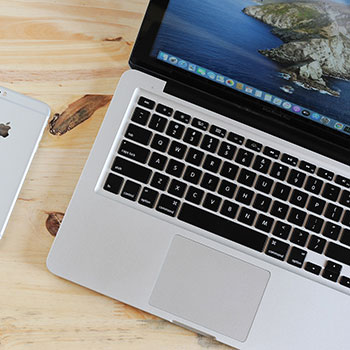
而所谓SOA,即Service-Oriented Architecture,意为“面向服务的架构”,威马W6的场景编程是它的实际应用,而它实际上是一种软件架构设计的模型和方法论,早在1996年就由全球权威IT研究机构Gartner提出了,但当时的技术水平和市场环境并不具备将SOA技术投入实际应用的条件,而它真正投入应用也是从IT行业开始的。
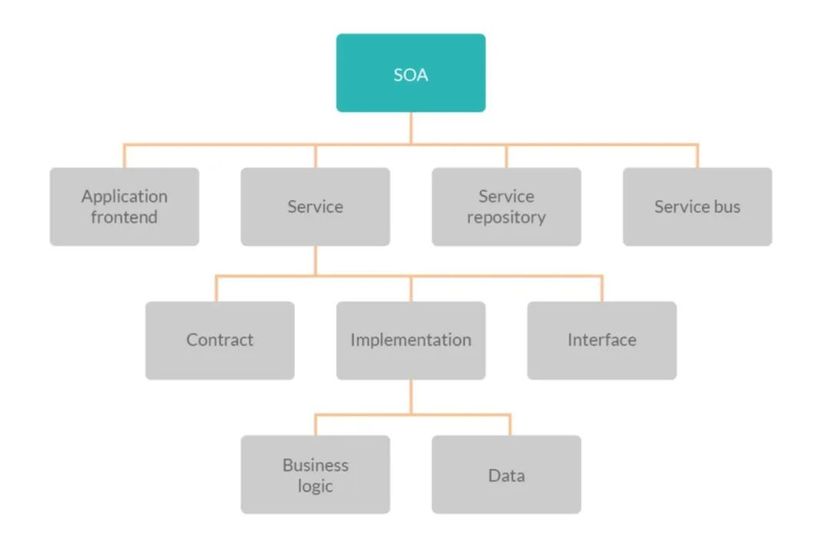
在IT行业中,SOA是将应用程序的不同功能单元和模块进行拆分并建立联系,供使用者进行开发设计,比如智能手机支持我们随意更换桌面壁纸、来电铃声、应用提示音、屏幕亮度等等,就可以理解为SOA这个大概念的实际应用形式,而汽车的SOA可以理解为在汽车上建立应用商店,拓展应用程序层面的开发空间。

比如,过去更传统的以机械传动为基础的车辆,很难做到用语音来控制车窗和空调,而未来的SOA就是将汽车上的各个模块各个硬件全部打碎并建立联系,以此构建一个基础平台,在这个平台上进行各式各样的开发和编辑,威马W6的SOA应用方式就是基于这个概念,所推出的“场景编程”。

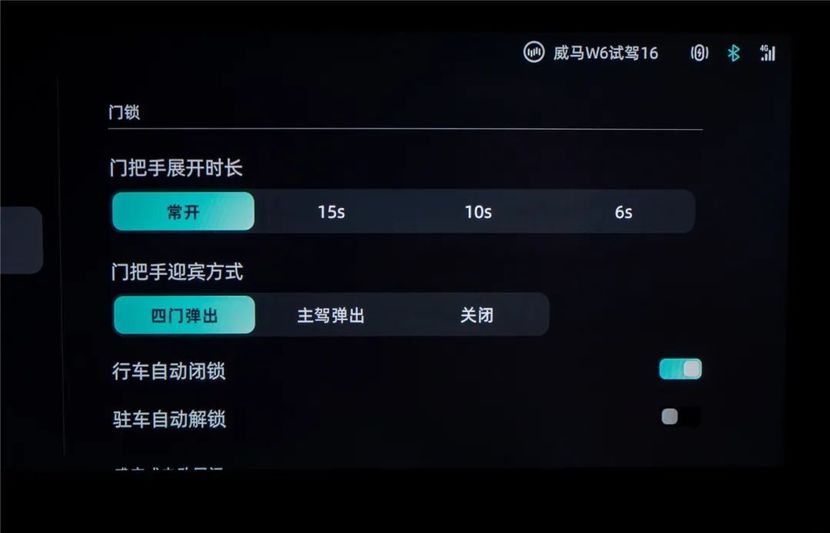
威马的场景编程支持用户对车辆设置进行自由组合和设定,包括驾驶辅助配置、车窗、座椅、空调、驾驶模式、音乐、氛围灯等硬件模块,来适配不同场景,目前W6车辆上预设了5种场景模式,即“小憩片刻”、“亲子空间”、“智能节能”、“性能模式”、“高速省心”,用户也可以自由创建其他场景。

从概念上理解,场景编程就像搭积木,不过搭积木也有区分,比如乐高,买一堆零散的乐高,你可以拼成各种各样的作品,但是你买一盒布加迪威龙的乐高,最后就只能拼成一辆布加迪,而不能自由发挥地拼成法拉利。

所以很多所谓的“模块化”,其实都不算真正意义的模块化,因为其最终成品大多是固定的,比如大众的MQB平台堪称千变万化,但是如果上了生产线造成了途昂,那么这套零件就只能造成途昂,没办法拆开重新拼成高尔夫。

这就让我想起了刚刚学习C++程序设计时,用一个最基础的随机数程序,运行之后会生成一组数字,看起来确实没有任何规律,但是如果再点一次运行,新生成的随机数和上一组却是一模一样的,那么这究竟算不算随机呢?

其实模块化定制的概念在汽车上已经有很多应用了,比如登录车主账号之后,能够保存车主习惯的一套车内设置,比如座椅位置、空调温度、电台频道、音乐歌单等等,但这个的意义更多在于“重置”到唯一的特定状态,却无法进行自由编辑,所以它虽然在定义上实现了可定制化,却程度有限。

而真正类似于场景定制概念的功能已经在其他某些领域有了应用,比如手机的会议模式和飞行模式等,比如楼下新开的踢车帮KTV包房中有动感、浪漫、温馨等灯光场景,比如车上的驾驶模式、地形模式等,甚至车载空调也有着场景定制概念藏在其中,比如打开自动模式,手动选择温度后,空调会自动调节风量来尽快达到预设温度,这不就是相当于选择了25℃场景或是18℃场景吗?

所以可以理解为,任何与“模式”相关的功能其实都能归类为场景定制,只不过大多是单一功能的定制,而面对复杂场景的不同需求,很多功能都需要调整到相应模式,这就需要繁琐的设置,不就又回到手动调节了吗?说白了,也就是不够智能。
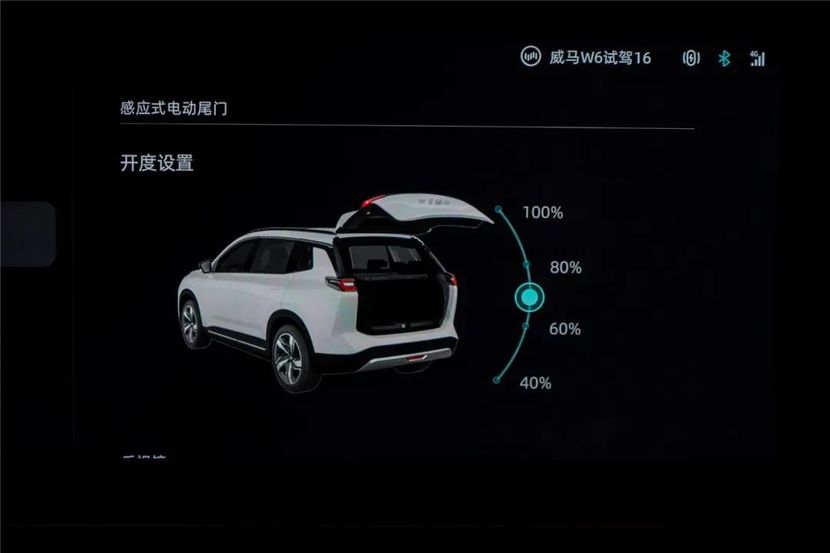
那么从基础层面思考,场景定制应该如何应用呢?比如车窗,手动调节车窗位置固然更加精确直接,但是假如设置3个按键,分别预设为全部关闭、开启一半、和全部开启,这就是最简单的场景定制了,其实目前的一键升降已经有了这个概念,只不过它仅有两个场景,即全部开启和全部关闭。
那么再复杂一点,车窗、灯光、空调、天窗、驾驶模式等全部联动起来,支持自由组合和设定,比如设定一个“大雨场景”,下大雨时点击这个场景卡片,自动关闭所有车窗和天窗,打开雾灯和雨刮,空调打开风挡除雾,驾驶模式从运动模式切换为经济模式,压制动力输出,防止扭矩过大车轮打滑,一步到位,不需要一项一项地去调节,方便又安全。

再设想另外一种场景,开车自驾到了一个风和日丽的景区,天气晴朗,微风轻柔,两边的花田阵阵飘香,此时点击一下之前创建的“风景场景”,车窗自动降下,空调关闭,发动机声浪关闭,速度放慢,车载音响放起轻快的音乐,自动开启前碰撞预警和车道保持,让你在欣赏风景时有基本的安全保障。

举一反三,“赶路场景”会自动关闭车窗,切换为运动模式,播放激昂的歌单;“休息场景”会自动放倒前排座椅,以小音量播放舒缓的音乐,空调开启外循环;那么还能想到“会议场景”、“求婚场景”、“派对场景”等,车辆具备的硬件功能越丰富,支持开放的接口越丰富,其定制化场景就越丰富,能够实现的功能也越多样化。

在万物智能化的时代,我们已经享受到了智能手机带来的便利,却还没有享受到真正意义上的智能汽车所带来的出行方式和出行理念的变化。不过正如我们能够清晰地理解当年第一台全屏触控手机对于现在的意义,智能汽车的未来,也会有一个不起眼的起点在多年之后被现在的我们所铭记。






暂无评论
发表评论